寫一程式控制伺服馬達 0 ~ 180 度反覆來回轉動。
電子電路圖
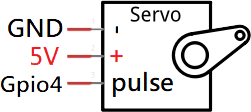
元件電路圖

演算法:
1. 測試位址(從 8 號至 119)。
2. 送出測試訊號
3. 如果成功,則顯示位址。。
4. 測試下一個位址,回到步驟 2。
程式碼:
#include <ESP32Servo.h> //載入函式庫
int pos = 0;//目前伺服馬達位置
Servo servo;
void setup(){
servo.attach(4);//第 4 隻 I/O 腳接伺服馬達
}
void loop(){
for (pos = 0; pos <= 180; pos++) {//正轉180度
servo.write(pos);//令馬達動作到 pos 角度
delay(15);//等待機械動作到位,並延遲
}
for (pos = 180; pos >= 0; pos--) {//反轉180度
servo.write(pos);//令馬達動作到 pos 角度
delay(15);//等待機械動作到位,並延遲
}
}
TinkerCad 完成後圖片